



行业应用
Industry 更新时间:2026-05-15
更新时间:2026-05-15 点击次数:
点击次数: 
激光测距模块是一种集成了激光发射器、接收器和信号处理电路的设备,用于测量目标物体与传感器之间的距离。其工作原理主要有飞行时间法(TOF)以及三角法。
DTOF利用激光脉冲测量距离,通过发射激光脉冲并测量其返回时间来计算距离;ITOF则基于相位法原理工作,通过发射调制连续波并比较发射和接收信号之间的相位差计算距离。TOF法具有非接触、高精度和快速响应等特点,在液位控制、智能制造以及物流仓储等领域得到了广泛应用。
三角法通过计算激光在目标物体表面散射后的角度变化来确定距离,检测被测物表面的粗糙度、厚度以及形状,测程短、测速快、重复精度高,适用于批量工件的精密工业检测。
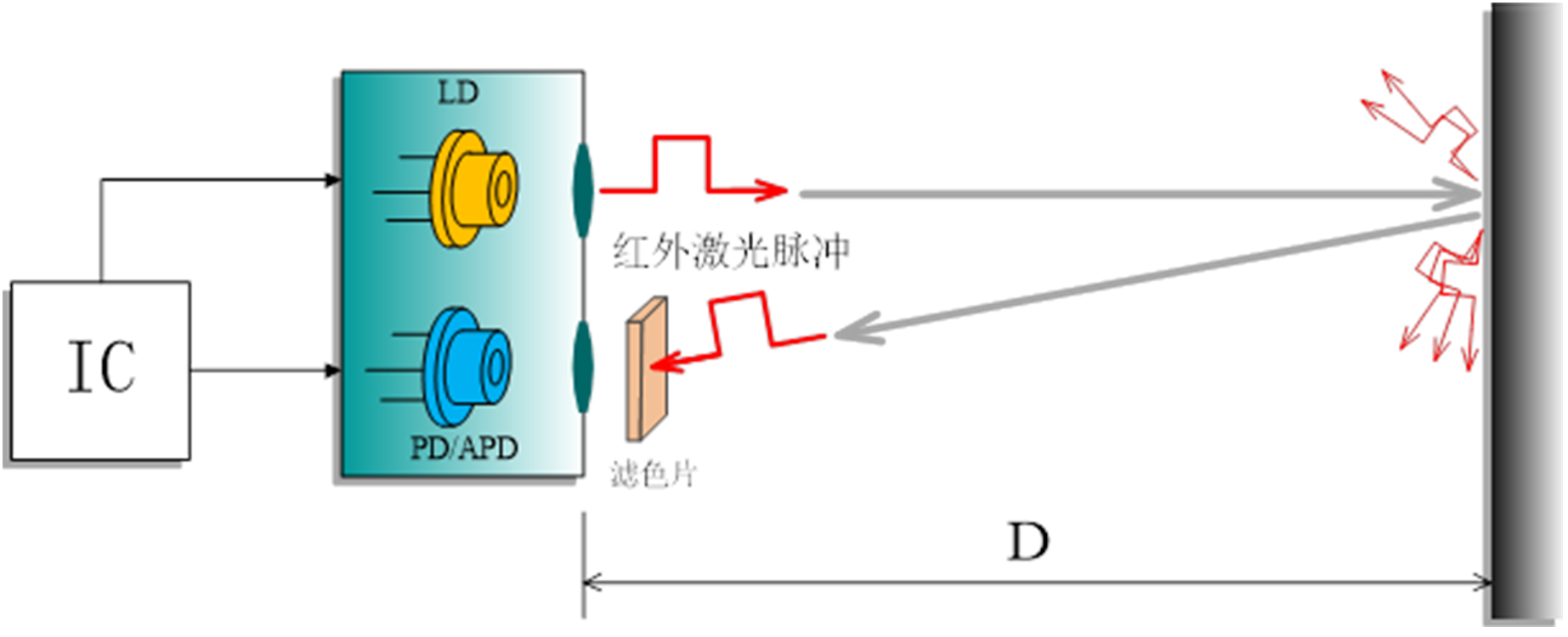
激光器向目标发射脉冲激光,经目标反射后,由探测器接收。通过计时器获得发射脉冲与接收脉冲之间的往返时间差Δt以及光速c,计算出目标的距离D。
D=c*Δt /2
脉冲dTOF电路中内部集成了一枚发出固定时钟频率的芯片,当脉冲激光发出时计时器记录下起点时间,光经过目标障碍物反射回回波信号,后被探测器接收时,计时器记录终止时间,采集到一个脉冲周期的时间间隔Δt,再根据dTOF公式计算得出与目标障碍物的距离。

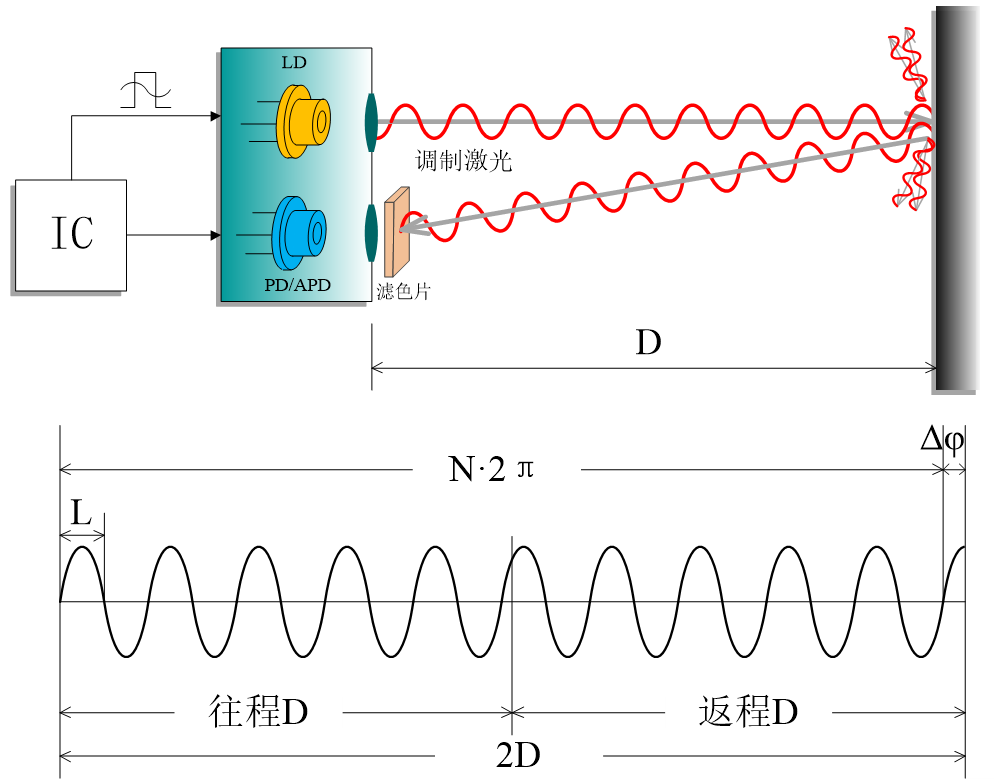
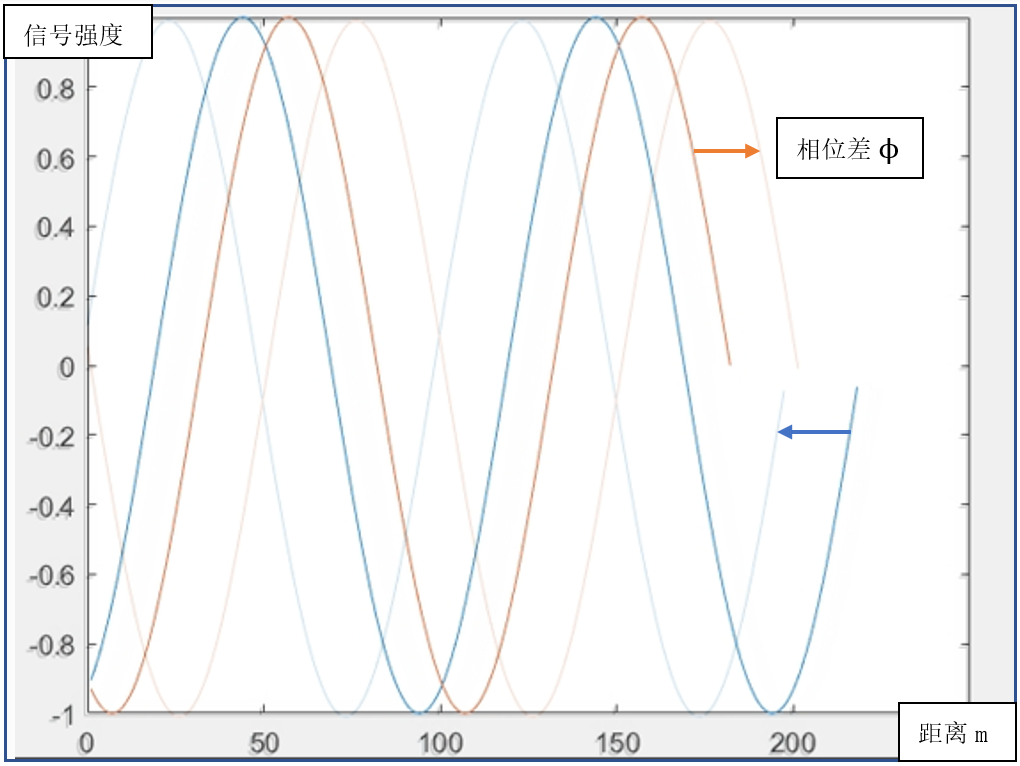
ITOF通过发射一束调制的连续激光信号,当这束激光照射到目标物体后反射回来,接收器会捕捉到反射信号,并与发射信号进行比较,通过计算两束信号之间的相位差来确定目标物体的距离。

其中,D是测量距离,c是光速, 是相位差,f是调制信号的频率。
是相位差,f是调制信号的频率。
相位测距法的采样率高,测量精度高(由计数时钟频率相对调制频率的比值决定)。测程有限,但可通过更改尺长(调制频率)适应各种距离的测量,如果需要同时满足大测程和高精度,则必须通过多频激光测量完成。
激光三角法是根据PSD上像点的位移来测算目标障碍物距离的方法。三角法有直射式和斜射式两种结构,假设测量像点在光敏面上的位移为x,待测面沿轴方向的位移为H,分别可得到两种方法下x与H的关系式。
直射式:

 (1)
(1)
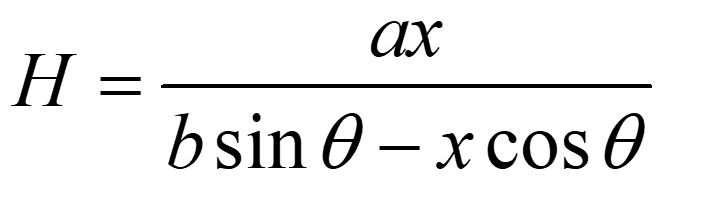
斜射式:

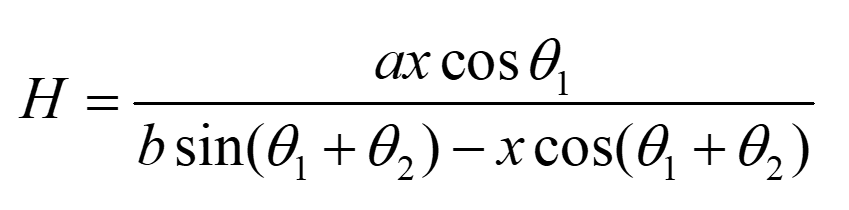 (2)
(2)
公式(1)和(2)中,x可通过PSD输出得到,a、b、θ、θ1、θ2则由测试系统决定。
斜射式入射光的光点照射在被测面的不同点上,无法知道被测面中某点的位移情况,而直射式结构却可以。因此,当被测面的法线无法确定或被测面形复杂时,只能采用直射式结构。


电子邮箱: sales@lh-oe.com

热线电话: 021-5108 2420

公司地址: 上海市杨浦区国霞路258号707
 当前位置:
当前位置: 
 关于朗辉
关于朗辉 



